



Infra-EYE 2

Infra-EYE 2 (v.2008)
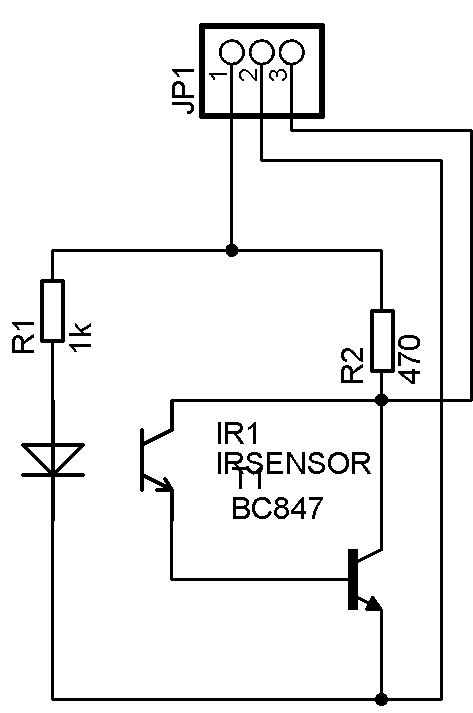
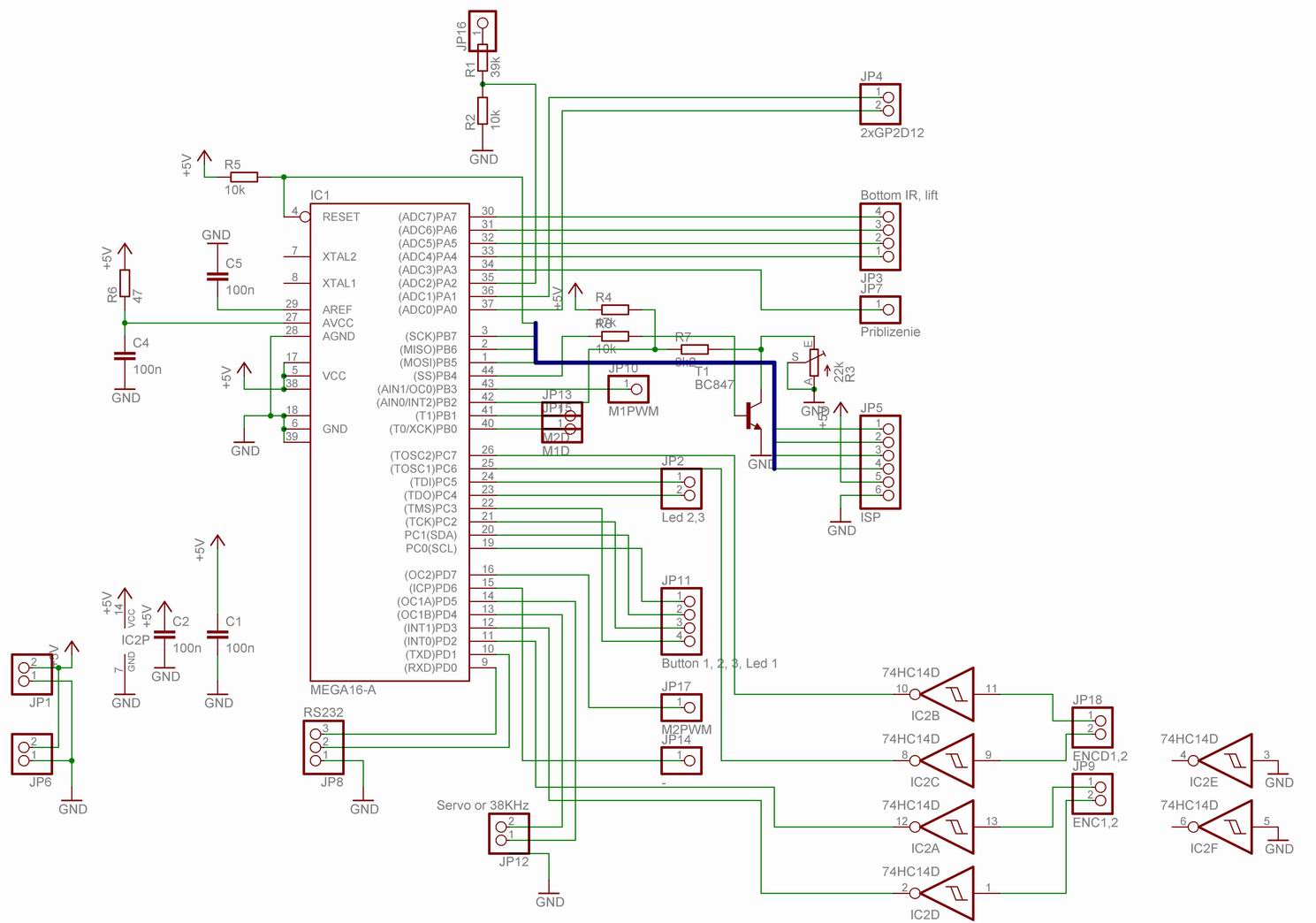
Robot je riadený 8-bitovým mikroprocesorom ATmega16 pracujúcim na hodinovej frekvencii 8 MHz. Na detekciu čiary slúžia dva reflexné optočleny GP2S27CJ000F na spodnej strane robota. Na detekciu nepriateľa používam teraz dva senzory GP2Y0D340K. GP2Y0D340K je reflexný snímač s digitálnym výstupom. Síce neumožňuje merať vzdialenosť ako GP2D12 ale túto možnosť som aj tak nevyužíval. Nový typ je menší o trochu lacnejší a odpadá potreba komparátora na vyhodnocovanie vzdialenosti. Citlivosť je do 40cm čo je ideálny kompromis medzi dobrou detekčnou schopnosťou a odolnosťou proti detekcii objektov v okolí ringu. Procesor zabezpečuje kompletný chod robota. Sníma stav senzorov, rozhoduje sa kam pôjde a PI regulátor rýchlosti spolu z integrovaným generátorom PWM dodáva riadiace signály pre budič motorov.
Schéma riadiacej jednotky. (Control unit schematic)
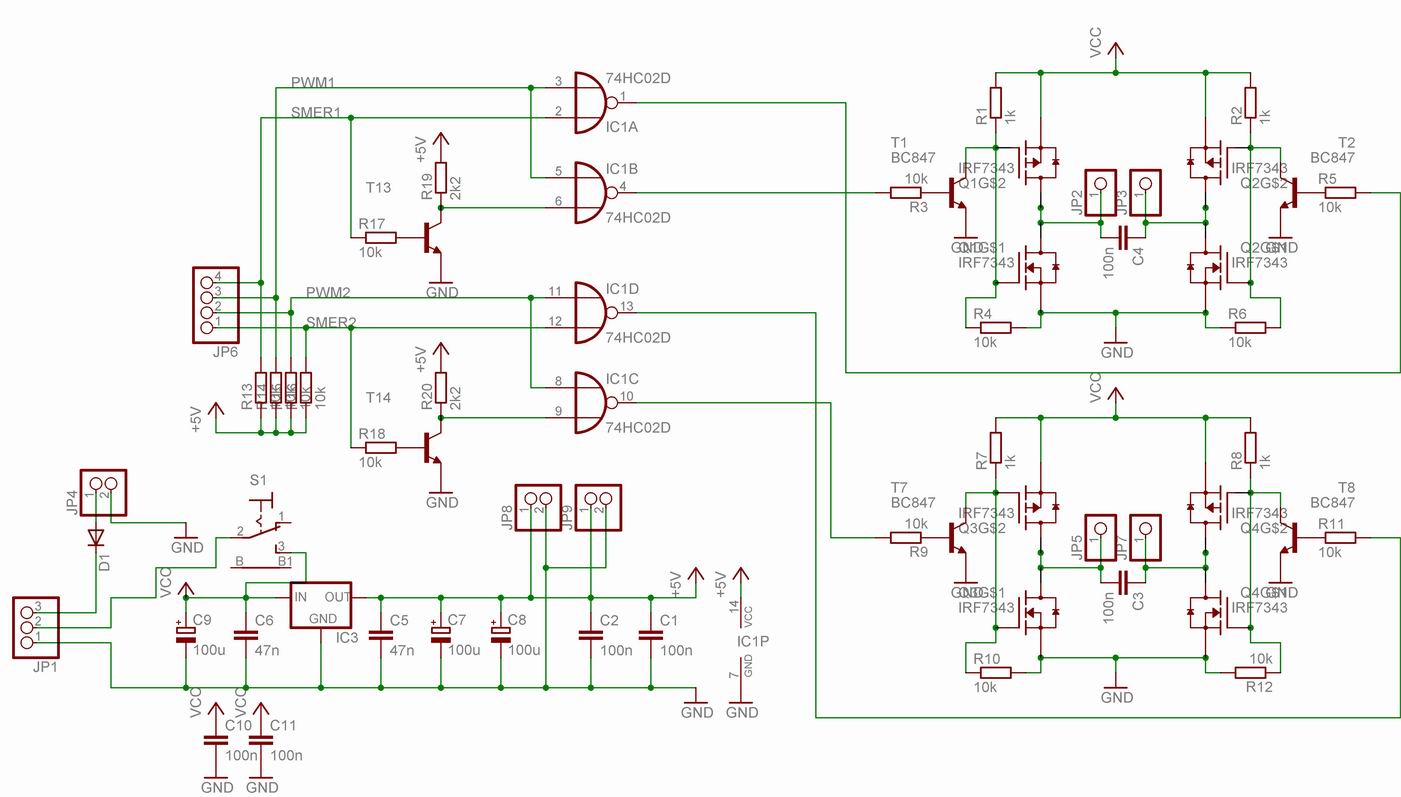
Modelárske servá boli nahradené jednosmernými motormi s permanentným magnetom a súosou prevodovkou. Myslím že typ L149 21:1 6V (nechce sa mi to rozoberať :-D) z katalógu firmy Elfa.Objednával som to cez www.dialogue.sk. Budiaci mostík dostal výkonnejšie tranzistory. IRF7343 v SO8 puzdre. 3A by mal by dostatočný prúd pre akéhokoľvek MiniSuma. Na doske riadenia motorov sa nachádza i invertor tvarujúci signáli z optických enkóderov z myši.
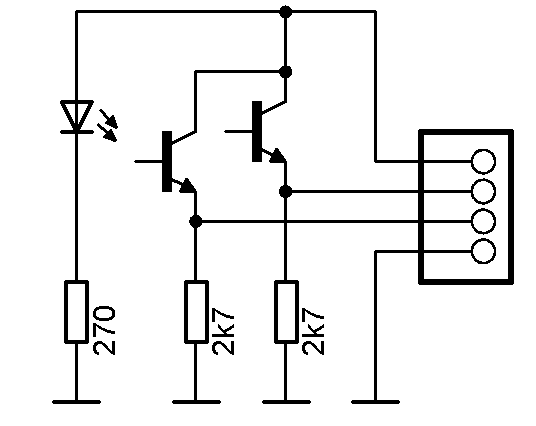
Schéma riadenia motorov. (Motor driver schematic)
Program je napísaný v jazyku C. Prioritne sú kontrolované snímače čiary, potom vyhodnocujem ostatné senzory a ak ani tie nedetekujú prekážku tak idem jednoducho rovno. Na programovanie používam AVRstudio, ktoré je voľne stiahnuteľné zo stránok www.atmel.com a kópiu ISP programátora STK500.
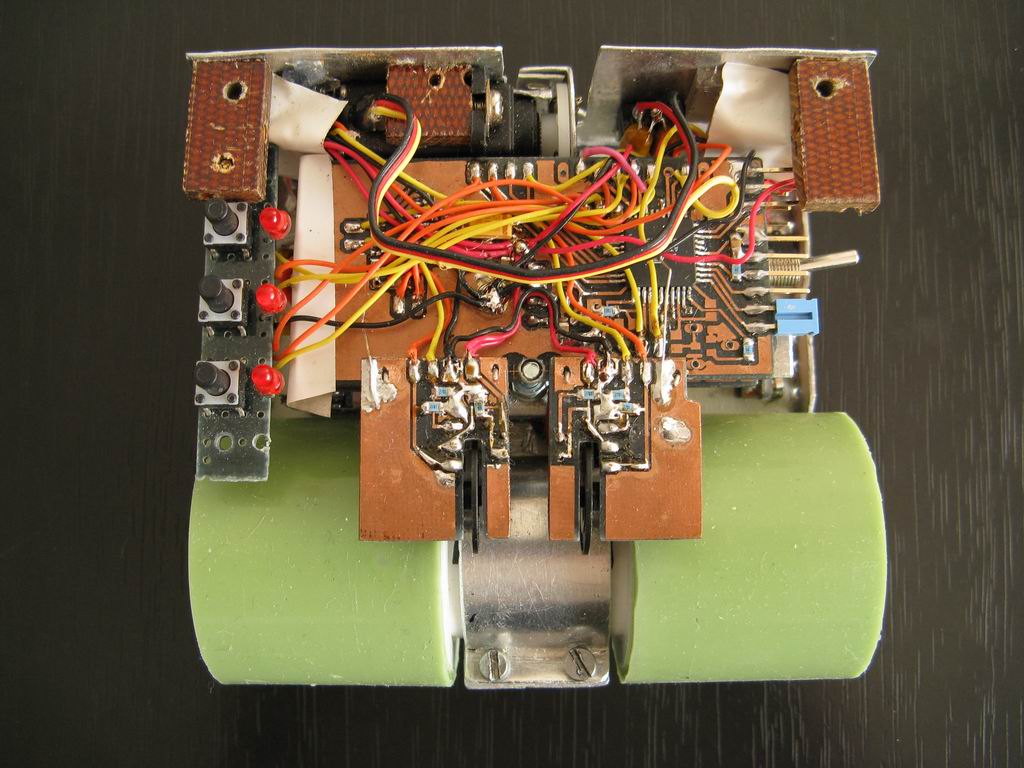
Na záver zopár fotiek najnovšej verzie.
|
|
|
|
|
|
|
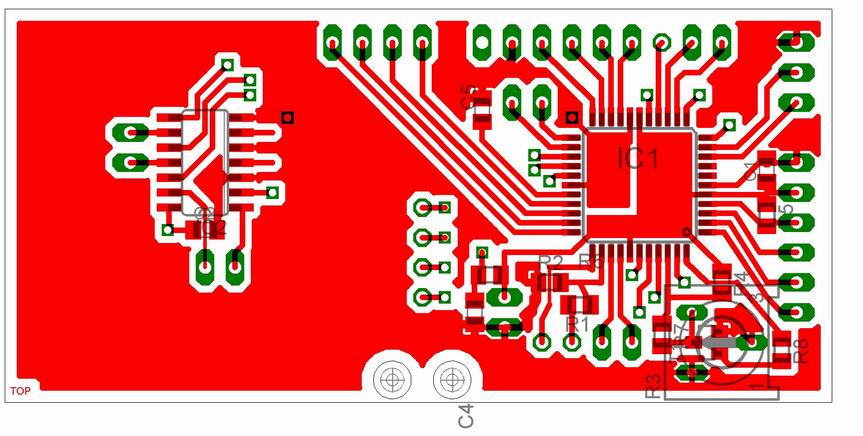
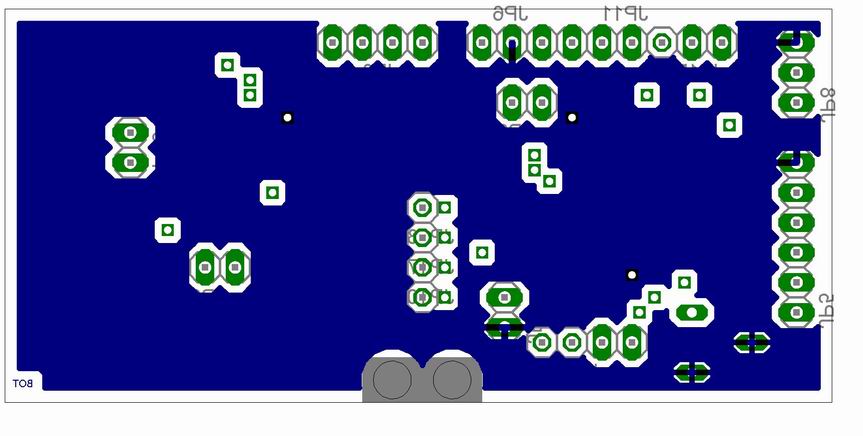
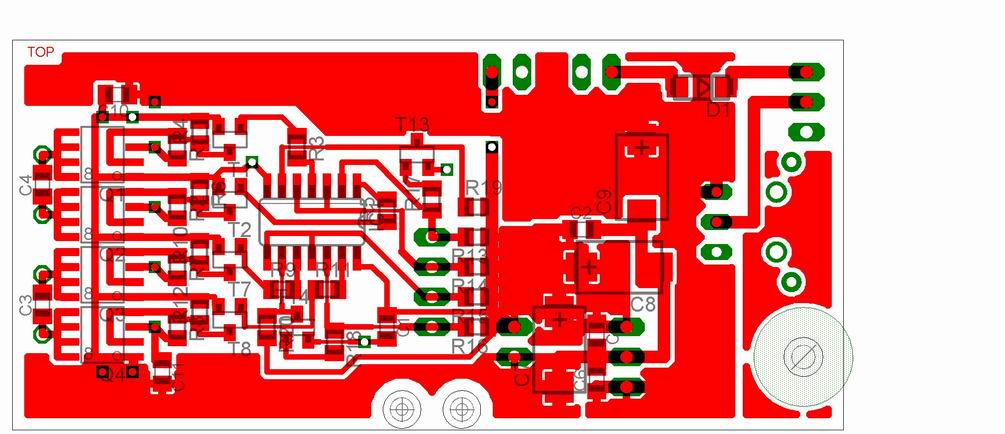
Control board |
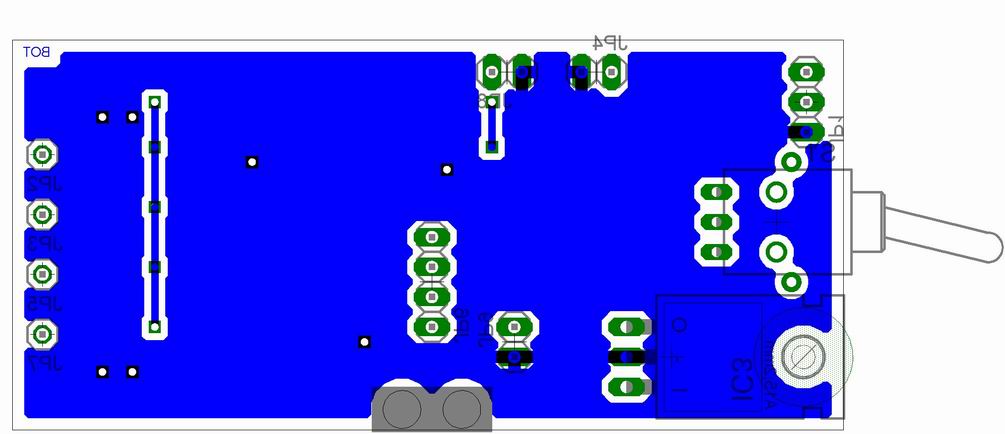
Motor driver board |

{kind=link}
{kind=link}