



Infra-EYE

Minuloročný Infra-EYE (v.2006)
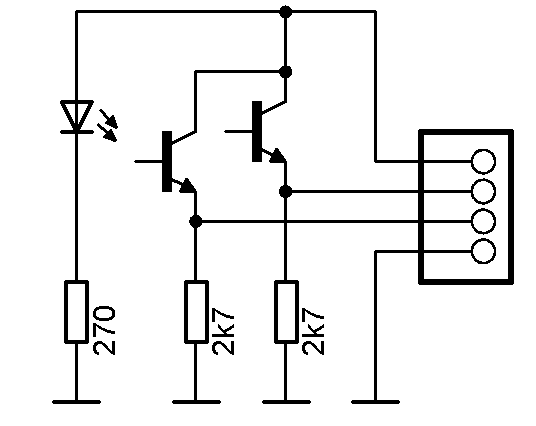
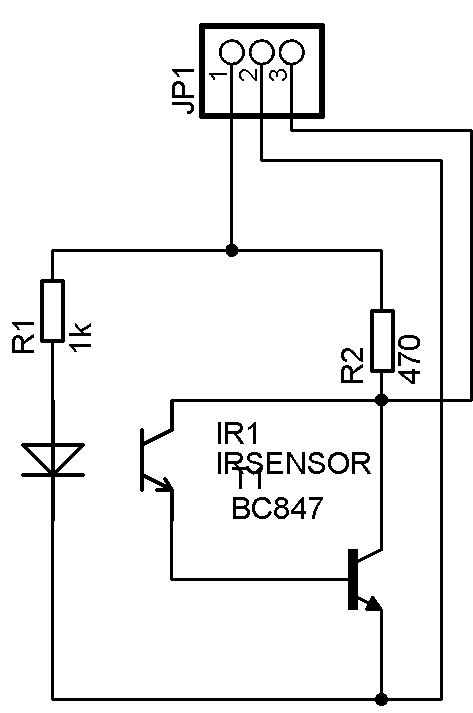
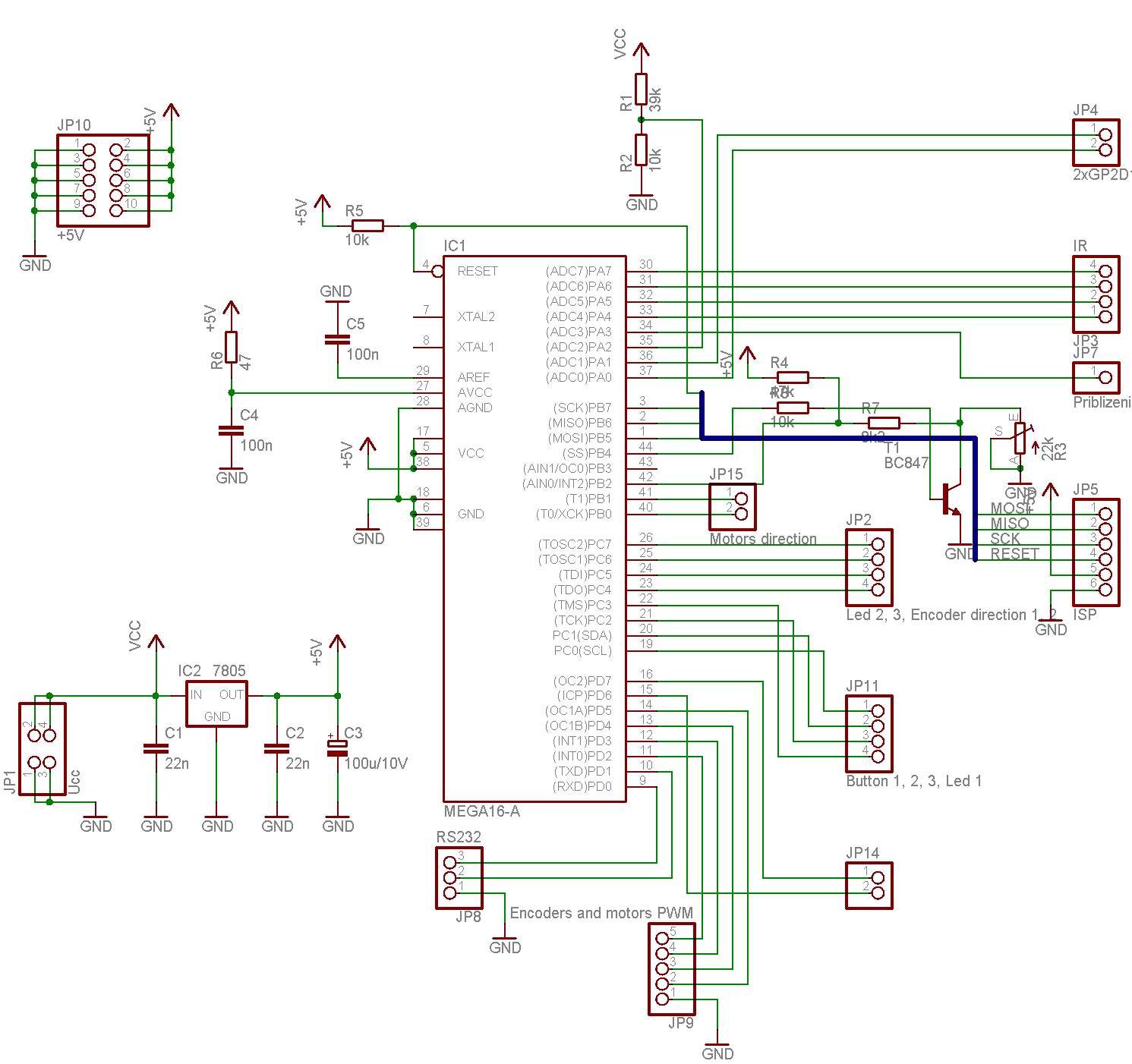
Môj robot je riadený 8-bitovým mikroprocesorom ATmega16 pracujúcim na hodinovej frekvencii 8 MHz. Na detekciu čiary slúžia dva reflexné optočleny a na detekciu nepriatela používam dva senzory GP2D12 a jeden SFH 5110. Tie sú pripojené na vstupy mikroprocesora nastavené v režime analógového komparátora. Rôznu referenciu pre reflexný senzor a GP2D12 umožnuje nastaviť zapojenie okolo tranzistora T1. Ide o napäťový delič s výstupným napätím 0,8 V (pre GP2D12)a 0,8 - 2 V (pre detektor čiary).
Schéma riadiacej jednotky. (Control unit schematic)
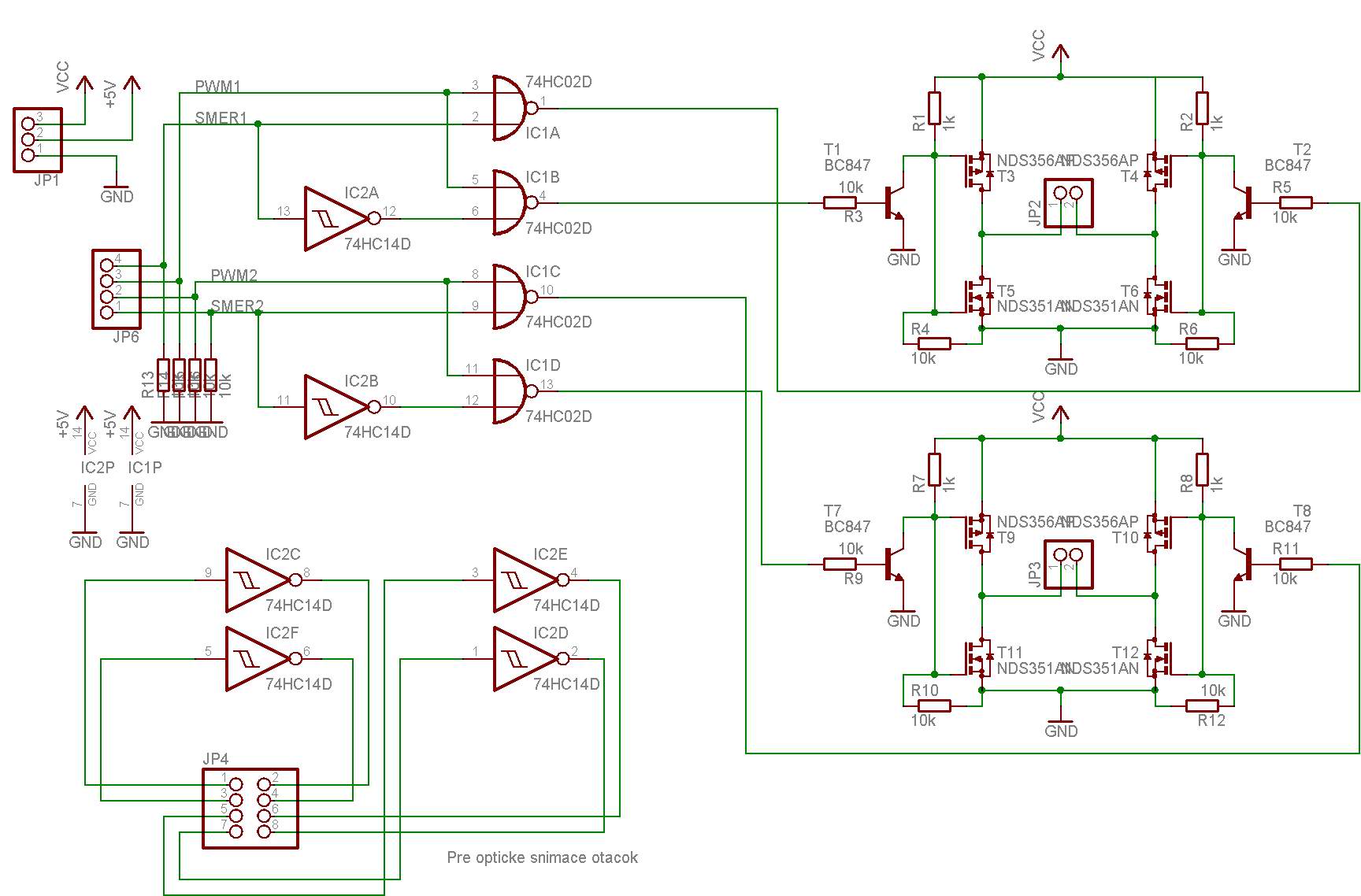
Ako motory používam upravené modelárske servá, ktorým som odstránil zarážky a elektroniku. Budím ich pomocou mostíka zostaveného z unipolárnych tranzistorov. Použité súčiastky by mali dať maximálny prúd do 1 A ale tranzistory ponúka len www.farnell.com (zastúpenie pre slovensko www.dialogue.sk. Na doske riadenia motorov sa nachádza i invertor tvarujúci signáli z optických enkóderov z myši.
Schéma riadenia motorov. (Motor driver schematic)
Hlavným problémom minuloročnej verzie bola nízka hmotnosť robota, tú som sa snažil vylepšit asi 100 gramami matíc, čo ale sťažilo pohyb robota. Takže tento raz je celá konštrukcia vyrobená z kovových plechov a tým je i celý robot mohutnejší.
Program je napísaný v jazyku C. Prioritne sú kontrolované snímače čiary, potom vyhodnocujem ostatné senzory a ak ani tie nedetekujú prekážku tak idem jednoducho rovno. Na programovanie používam AVRstudio, ktoré je voľne stiahnuteľné zo stránok www.atmel.com a kópiu ISP programátora STK500. Celý program je na stiahnuie tu: infra-eye2.rar.
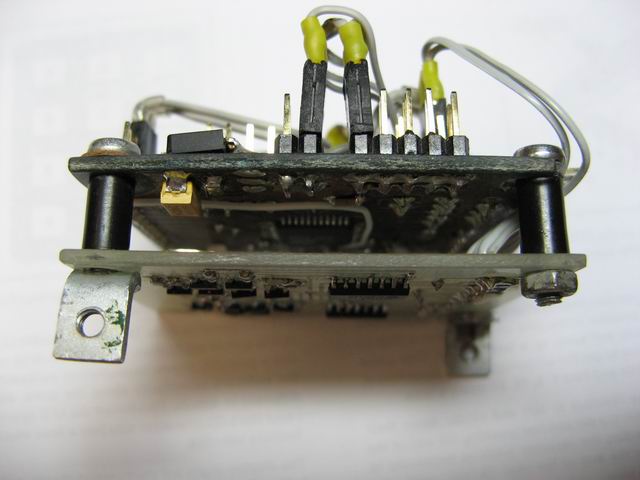
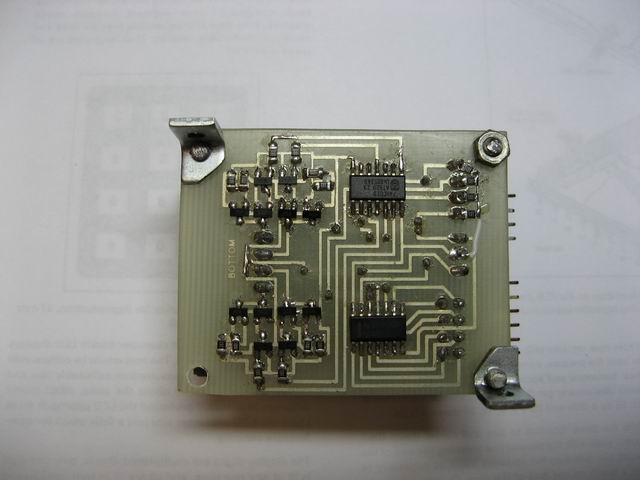
Na záver ešte zopár fotiek novej verzie.
|
|
|
|
|
|


{kind=link}
{kind=link}